










Page soumise par Mooky
| <= Page précédante <= | Sommaire | => Page suivante => |
13.10. Armaturage (Rigging) d'une mecanique
à partir de Blender v2.31
Les armatures sont aussi importantes pour les personnages mécaniques, comme les robots, les méca-guerriers, etc... (Figure 13-55).
Figure 13-55. Méca-araignée à 4 pattes.

La première étape est de créer le maillage (mesh) des pattes. N'oubliez pas que nous concevons quelque chose de mécanique, pas organique. Alors pas de forme entièrement constituée d'un maillage unique. Les bras/jambes/cequevousvoulez sont faits de plusieurs parties rigides, c'est donc chacune de ces parties qui sera un maillage unique, et ces parties seront déplacées/orientées les unes par rapport aux autres.
Bien que la Figure 13-55 ait 4 pattes de type araignée, chacune constituée de 5 parties, il sera plus facile d'expliquer les astuces avec un bras à une seule articulation.
Ma suggestion est celle-ci: fabriquez le bras avec 2 parties identiques, et l'avant-bras, sur la droite, avec une seule. Remarquez les cylindres qui représentent l'épaule (à gauche) le coude (au centre) et le poignet (à droite) (Figure 13-56).
Figure 13-56. Le modèle

Les autres cylindres au milieu du bras et de l'avant-bras sont les futures attaches du piston.
Notez que tout sera plus facile si les axes de rotation (épaule, coude, etc...) sont placés sur des points d'intersection de la grille. Les manipulations futures seront simplifiées si vous maîtrisez correctement le menu Snap de Blender.
13.10.1. Points-pivots
Maintenant ajoutez les axes mécaniques sur les points-pivots. Théoriquement, vous devriez en ajouter un sur chaque articulation, et 2 pour chaque piston. Dans un esprit de simplicité, il n'y a ici que les 2 axes du piston, constitués de cylindres fermés (pas des tubes) (Figure 13-57).
Figure 13-57. Le modèle avec ses points-pivots.

Notez 2 choses :
- Il est fondamental que le centre du maillage de chaque objet (axe) soit exactement centré/aligné sur l'axe de rotation du piston.
- Chaque axe doit être "parenté" avec la partie du bras corespondante.
13.10.2. L'armature
Maintenant il est temps de créer l'armature. Deux os seront suffisants (Figure 13-58).
Figure 13-58. Le modèle et son armature
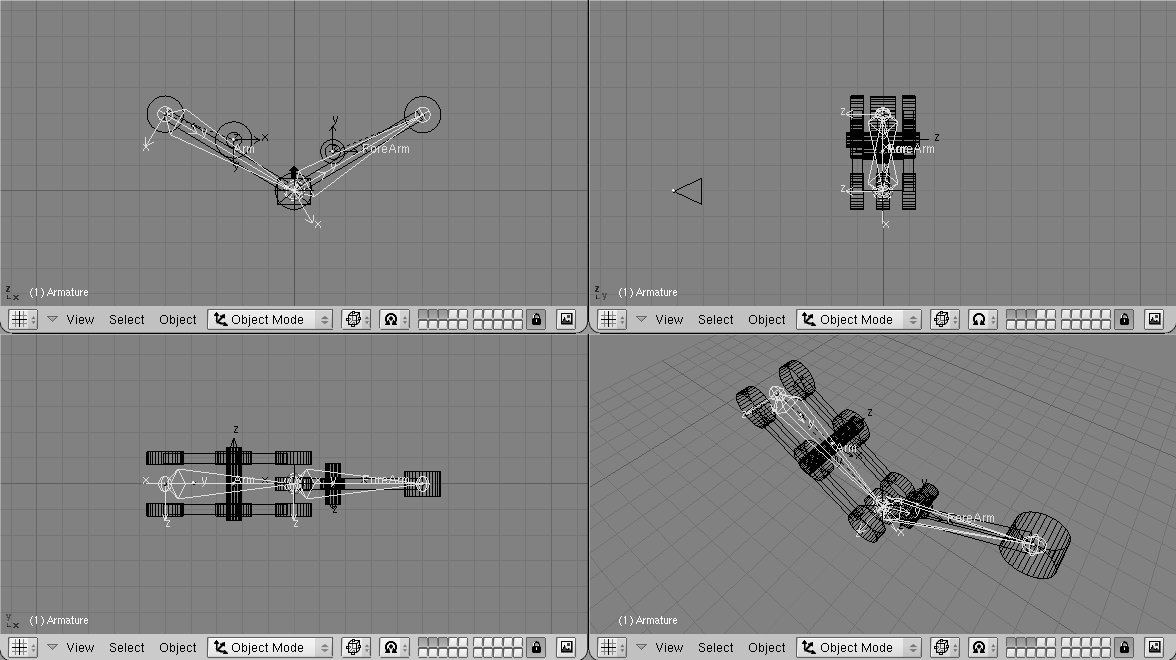
Pour avoir un mouvement précis, les articulations doivent être placées exactement sur les axes (c'est pourquoi je vous disais plus haut de placer ces axes sur des intersections de la grille, ainsi vous pourrez utiliser la fonction Move Selected To Grid du menu snap).
Nommez astucieusement les os (Bras et avant-bras par exemple, arm et forearm en rosbif ou yankee, selon le coté de l'atlantique ou on est :) ). "Parentez" le maillage du bras avec l'os correspondant de l'armature, en sélectionnant l'option Bone et l'os du bras (Arm bone). Faites la même chose entre le maillage de l'avant-bras et l'os de l'avant-bras.
Astuce Parent to Bone
Parent to bone fait efficacement suivre l'os
par l'objet sans aucune déformation. C'est ce qui doit se passer
avec un robot fait de morceaux d'acier indéformables!
Figure 13-59. Le modéle en mode Pose

Si vous passez en mode Pose, vous pouvez déplacer le bras en faisant pivoter les os (Figure 13-59). Si vous le voulez, vous pouvez ajouter un IK solver comme nous l'avons déja fait dans la section précédente.
13.10.3. La partie Hydraulique
Figure 13-60. Le piston hydraulique.
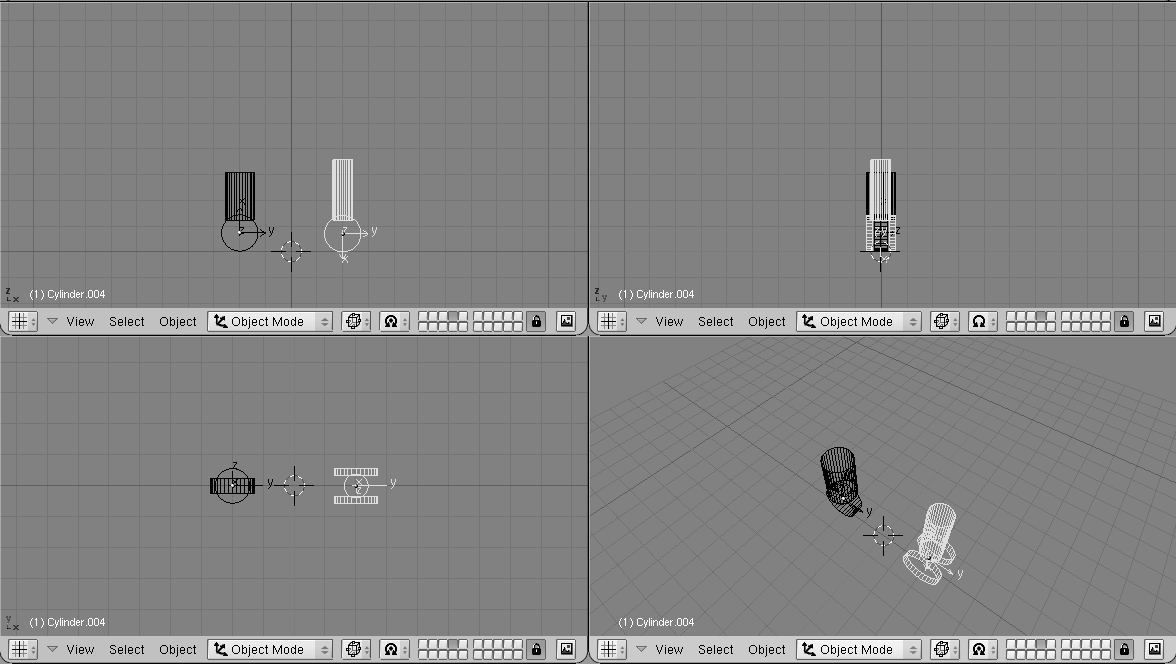
Faites un piston constitué de 2 cylindres, l'un plus étroit que l'autre, avec de jolis embouts pour les raccorder aux points-pivots (Figure 13-60).
Il est indispensable que chacunes des 2 parties (les embouts) aient le centre de leur maillage exactement sur leurs axes de rotations respectifs.
Placez-les dans la bonne position et "parentez" chaque partie du piston au maillage de l'objet correspondant à son axe (Figure 13-61).
Figure 13-61. Piston hydraulique sur le bras.

Si maintenant vous faites pivoter chacune des pièces dans la position qu'elle devrait avoir pour former une image fixe correcte, vous aurez un joli piston. (Figure 13-62, gauche).
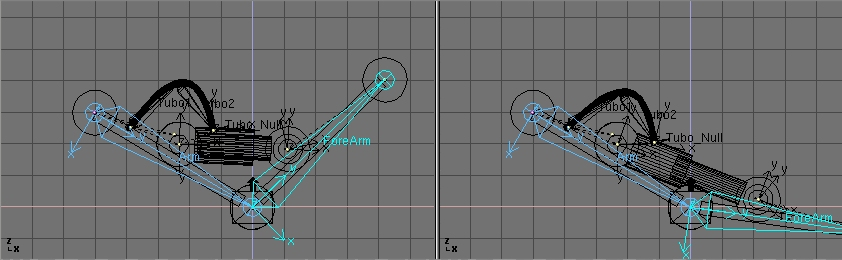
Figure 13-62. Piston hydraulique en mode Pose.

Attention, si vous passez en mode Pose et que vous déplacez le bras ou l'avant-bras, le piston va tourner vers le haut... (Figure 13-62, droite).
Pour que le piston fonctionne normalement, vous devez faire en sorte que chaque moitié de piston "tracke" l'axe de pivotement de l'autre moitié du piston (pas l'autre moitié du même piston! Ceci ferait une boucle de contrainte détéctée par Blender comme une erreur). C'est pourquoi, les positions des centres des maillages sont si importants (Figure 13-63).
Figure 13-63. Piston hydraulique avec tracking mutuel.

Sélectionnez une moitié du piston, sélectionnez le maillage de l'axe de l'autre moitié du piston, et, dans le menu contextuel Object (F7) et le paneau Constraints, ajoutez une Constraint: Track to. Les boutons suivants X,Y... doivent être correctement configurés (Figure 13-64).
Figure 13-64. Réglages de traque.

Si vous préférez le système "Old Track", souvenez-vous d'enclancher le bouton PowerTrack dans le panneau Anim Setting pour un meilleur résultat.
Maintenant, si vous passez en mode Pose et faites pivoter les os, le piston coulissera normalement, comme il le ferait dans la réalité. (Figure 13-65).
Figure 13-65. Bras et piston en mode Pose.

Le problème maintenant est que, puisque les pistons fonctionnent avec de l'huile sous pression qui leur est injectée, pour un modèle vraiement réaliste, nous devons ajouter des tuyaux. Mais comment placer un tuyau qui se deforme, allant du bras au piston Chaque bout devant être rattaché à des parties rigides en rotation l'une par rapport à l'autre. Ceci nécessite les IK!
Figure 13-66. Ajouter un tuyau flexible.
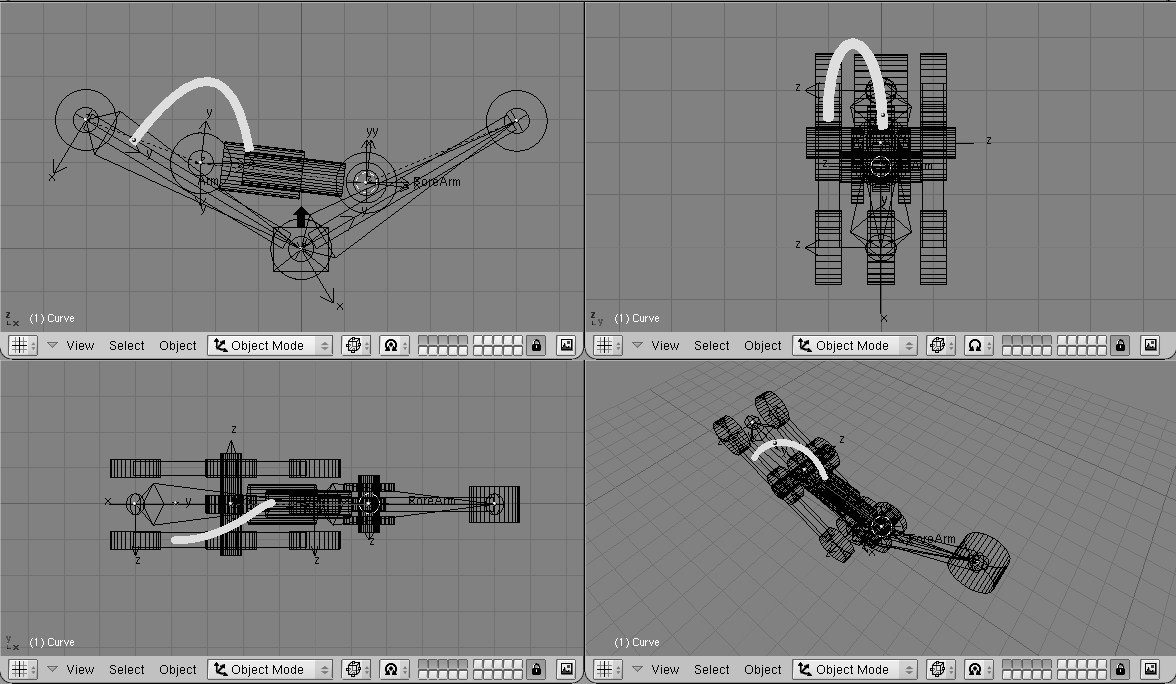
D'abord ajoutez un maillage de la forme du tube que vous voulez modéliser (Figure 13-66).
Personnellement, je préfère dessiner le tube dans sa position tordue comme une courbe bevelled. On fait ceci en ajoutant une courbe de Bézier, un cercle de Bézier, et en utilisant le cercle de Bézier comme BevOb sur la courbe de Bézier. Ensuite convertissez-le en un maillage (ALT-C) pour pouvoir le déformer avec une armature.
Figure 13-67. Ajouter une armature au tube.

Maintenant, ajoutons une armature. Une paire d'os suffira. Cette armature devra aller du bout "fixe" du tube (le haut du bras), jusqu'à son autre extrémité "mobile" (l'une des parties du piston). Ajoutez un troisième os qui sera utilisé pour les Inverse Kinematics solution (Figure 13-67).
Vérifiez bien que l'armature est correctement "parentée" à l'objet où la partie "fixe" du tube est... disons..., fixée. Dans le cas qui nous intéresse, le bras du robot. Ajoutez aussi un Empty (objet vide) à l'extrémité mobile du tube (Figure 13-68).
Figure 13-68. L' "Empty" pour la solution IKA d'animation.

Figure 13-69. IKA constraint.
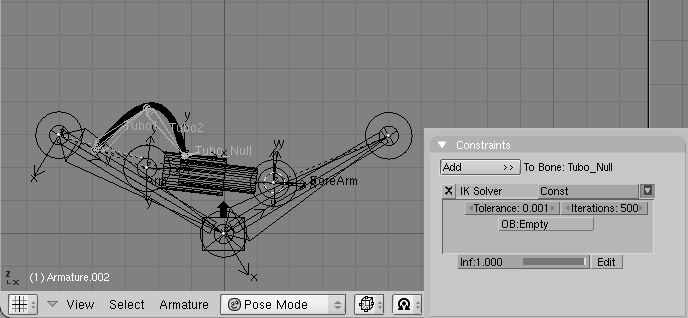
Parentez l'objet vide (empty) à la partie "mobile" de la structure. Dans ce cas, la partie extérieure du piston à laquelle le tuyau est relié. En mode pose, allez dans le panneau Object et au panneau Constraints. Sélectionnez le dernier os, celui qui commence là où le tube finit (!!!), et ajoutez une constraint. Séléctionnez IK solver comme type de constraint et sélectionnez l'objet vide récemment créé comme cible Object OB: (Figure 13-69). Vous pouvez jouer avec la tolérance et les itérations si vous le voulez.
Enfin "parentez" le tube à l'armature via l'option Armature. Créez des groupes de vertex si vous le voulez. Maintenant si, une fois pasé en mode Pose, vous déplacez le bras, les deux parties du piston se déplacent normalement, et l'objet vide suit. Ceci oblige l'IK Armature du tuyau à se déplacer, pour suivre l'objet vide, ce qui a pour conséquence de déformer le-dit tuyau (Figure 13-69).
Figure 13-70. Le bras robotique complet en mode Pose.
Note:
Vous pouvez utiliser un os de l'armature, au lieu
d'un objet vide, comme un IK solver, mais dans ce cas vous ne
pourez pas "parenter" l'os à l'objet mobile. Vous pouvez d'une
autre manière, utiliser une constraint de Copy
Location, mais ceci est moins facile car la copy location
déplacera le bout de l'armature vers le centre de l'objet
mobile, ce qui n'est pas le bon emplacement.
| <= Page précédante <= | Sommaire | => Page suivante => |
Page soumise par Mooky